Mars 2020
| Mars 2020 | |||||
|---|---|---|---|---|---|
| Emblema missione | |||||

| |||||
| Immagine del veicolo | |||||
 | |||||
| Dati della missione | |||||
| Operatore | |||||
| Tipo di missione | Esplorazione di Marte | ||||
| NSSDC ID | 2020-052A | ||||
| SCN | 45983 | ||||
| Destinazione | Marte | ||||
| Esito | atterrata | ||||
| Vettore | Atlas V 541[1][2] | ||||
| Lancio | 30 luglio 2020, 11:50 UTC[3] | ||||
| Luogo lancio | Cape Canaveral[1][4] | ||||
| Atterraggio | 18 febbraio 2021[5][6][7] | ||||
| Sito atterraggio | Cratere Jezero | ||||
| Durata | In programma: almeno un anno marziano[6] | ||||
| Proprietà del veicolo spaziale | |||||
| Massa | 1025 kg[8] | ||||
| Costruttore | |||||
| Strumentazione | |||||
| Sito ufficiale | |||||
| Mars Exploration Program | |||||
| |||||
Mars 2020 è una missione spaziale per l'esplorazione di Marte che è stata sviluppata dalla NASA, il cui lancio è avvenuto con successo il 30 luglio 2020[3] ed il suo arrivo sulla superficie di Marte ha avuto altrettanto esito positivo il giorno 18 febbraio 2021 alle ore 21:55 CET.[11][7] La missione è incentrata principalmente sull'invio di Perseverance sulla superficie di Marte, un rover derivato dal predecessore Curiosity per ridurre i costi, a cui sono state applicate diverse migliorie.[5] Oltre al rover c'è un piccolo elicottero dimostrativo chiamato Ingenuity.
Gli obiettivi primari della missione consistono nello studiare l'abitabilità di Marte, nell'investigare il suo passato e cercare tracce di eventuale vita biologica. Si prevede, inoltre, lo stoccaggio di campioni geologici per consentire alla futura missione Mars Sample Return di portarli sulla Terra col fine di analizzarli accuratamente.[6][12]
Sviluppo
La missione Mars 2020 fa parte del programma di esplorazione Mars Exploration Program della NASA, che include, oltre a Curiosity, le due sonde Mars Odyssey e Mars Reconnaissance Orbiter attualmente in orbita attorno al pianeta, e l'orbiter MAVEN che è arrivato su Marte nel mese di settembre 2016 e ne studierà l'alta atmosfera. A maggio 2018 è stato lanciato un lander chiamato InSight per dare un primo sguardo all'interno profondo del pianeta.
Obiettivi
Gli obiettivi principali prefissati dalla NASA sono quattro:[13]
- Determinare se la vita sia mai esistita su Marte: la missione del rover Perseverance si concentra su degli studi della superficie marziana in cerca di tracce di vita microbica preservate sulle rocce che hanno formato l'ambiente marziano in epoca antica.[14]
- Definire il clima di Marte: un punto centrale della missione consiste nel ricostruire il passato delle condizioni climatiche di Marte. Gli strumenti del rover cercheranno delle testimonianze di antichi ambienti dove la vita microbica sarebbe potuta esistere nel passato.[15]
- Descrivere la geologia marziana: il rover è progettato per studiare le formazioni rocciose con lo scopo di svelare maggiori informazioni sui processi geologici che hanno creato e modificato la crosta e la superficie marziana nel corso del tempo.[16]. Inoltre il rover è progettato per estrarre e stoccare dei campioni di roccia e suolo marziano per una eventuale futura missione che avrà il compito di portarli sulla Terra per analizzarli.[17]
- Preparazione per l'esplorazione umana: il rover sarà una dimostrazione scientifica per l'uso delle risorse naturali dell'ambiente marziano. Esso inoltre monitorerà le condizioni ambientali cosicché si possa capire meglio come proteggere gli esploratori umani, inserendosi nel progetto per le future spedizioni umane fissate per il 2030. Le missioni robotiche, similmente a quelle relative alla Luna, forniranno informazioni essenziali di base per meglio affrontare le future esplorazioni umane.[18]. In ultimo il rover testerà la produzione di ossigeno dall'atmosfera marziana ricca di anidride carbonica attraverso il MOXIE.
Costi
Secondo la NASA, Mars 2020, essendo il rover basato sul predecessore Curiosity, avrà un costo minore: 2,1 miliardi di dollari per lo sviluppo e il lancio della sonda[19] contro i 2,5 del predecessore.[20][21]
Caratteristiche tecniche

Il rover è basato sull'impronta e struttura di Curiosity,[5] ed è infatti dotato di un generatore termoelettrico a radioisotopi (MMRTG)[22][23], ovvero un generatore di calore ed energia elettrica, basato sul decadimento del plutonio, per alimentare e riscaldare il rover, in quanto la temperatura media sulla superficie di Marte è −63 °C[24].
Rispetto a Curiosity, però, il rover è stato dotato di un sistema di atterraggio perfezionato. In particolare ha potuto contare su due evoluzioni, il "Range Trigger" e il "Terrain-Relative Navigation".
Il Range Trigger è il sistema che controlla la tempistica dell'apertura dei paracadute durante la discesa. Conoscendo la propria posizione rispetto al sito di atterraggio previsto e ritardando o anticipando l'apertura dei paracadute è stato possibile ridurre del 50% l'ellisse di atterraggio, ovvero l'area stimata di arrivo, riducendo quindi i rischi di trovarsi in aree impervie o di scarso interesse. Prima di allora i paracadute delle varie sonde arrivate su Marte sono sempre stati aperti appena la capsula raggiungeva una velocità idonea a farlo; con questo sistema invece il paracadute è stato aperto nel momento più utile per avvicinarsi quanto più possibile al sito di atterraggio, ovviamente rimanendo sempre nei parametri di velocità richiesti. Se ad esempio il sistema di controllo si fosse accorto che il sito fosse stato superato, questo avrebbe comandato un'apertura anticipata rispetto al momento previsto; nel caso opposto l'apertura sarebbe stata posticipata aumentando la distanza percorsa in caduta.[5][25]
Il Terrain-Relative Navigation è invece un inedito sistema di determinazione delle caratteristiche del suolo nelle ultimissime fasi dell'atterraggio. Il computer che ha governato questa fase di missione ha avuto pre-caricata una mappa in alta risoluzione del sito di atterraggio, realizzata negli anni precedenti dalle sonde attualmente in orbita marziana e contenente a sua volta tutte le aree pericolose o sconsigliate per l'atterraggio. Durante la discesa il rover ha raccolto immagini in rapida successione della zona che ha sorvolato e confrontandole con la mappa conosciuta ha calcolato la sua posizione e la zona di arrivo stimata. Se la posizione calcolata fosse stata considerata pericolosa il sistema di navigazione avrebbe potuto spostare l'atterraggio in un'area preferibile all'interno di un raggio di 300 m. Precedentemente delle aree considerate interessanti per la possibile presenza di tracce di composti biologici o strutture geologiche particolari sono state scartate poiché presentavano possibili pericoli (rocce, pendii, ecc.) per il 99%. Con questo sistema di navigazione è stato invece possibile scegliere aree di atterraggio fino a oggi precluse, permettendo di selezionare aree con pericoli che sarebbero poi potuti essere evitati dal Terrain-Relative Navigation.[5][25]
Sempre nella fase di discesa è stata attiva anche la suite di strumenti MEDLI2, ovvero la seconda generazione della suite MEDLI, (MSL Entry, Descent and Landing Instrumentation) che ha raccolto dati quali pressione e temperatura atmosferica e dello scudo termico, permettendo di caratterizzare maggiormente l'atmosfera marziana per le future missioni. Durante l'atterraggio sono state attive diverse telecamere, permettendo di riprendere tutte le fasi dell'atterraggio: una telecamera ha ripreso i paracadute, una il suolo in basso sullo stadio di discesa, una era puntata in alto verso lo stadio di discesa e un'altra verso il suolo. È presente anche un microfono che ha raccolto i suoni durante tutte le fasi.[5][25]
Strumenti ed esperimenti scientifici
Perseverance

Il rover porta con sé sette strumenti scelti in una selezione fra 58 proposte,[9][10] 23 fotocamere tra cui: 9 cosiddette ingegneristiche, 7 scientifiche e ulteriori 7 adibite per la fase di discesa e atterraggio sul suolo marziano[26]. È inoltre dotato di due microfoni per registrare il suono ambientale durante la discesa, l'atterraggio e il funzionamento del rover sul suolo[27]. La massa complessiva ammonta a circa 29 kg mentre l'assorbimento massimo (cioè nel caso in cui tutti gli strumenti venissero azionati in contemporanea) è di 436 W.[9][10] Il costo totale dello sviluppo della strumentazione scientifica ammonta a circa 130 milioni di dollari.[20][21]
- Mastcam-Z:
- La Mastcam-Z è l'evoluzione della Mastcam montata su Curiosity[28], è un sistema di due telecamere panoramiche e stereoscopiche con la capacità di zoom (3x) che consente di riprendere immagini in 3-D e video ad alta risoluzione (con una velocità di 4 fotogrammi al secondo)[28] per permettere un esame dettagliato di oggetti anche distanti. Lo strumento determinerà anche la mineralogia della superficie marziana e assisterà il rover nelle operazioni.[5][10] Le due telecamere sono montate sul braccio principale del rover a un'altezza di 2 metri e a una distanza di 24,2 cm per permettere la stereovisione. La Mastcam-Z permetterà agli scienziati di ricostruire la storia geologica del sito attraverso la stratigrafia degli affioramenti rocciosi nonché il riconoscimento del tipo di roccia (per es. sedimentarie o ignee). La Mastcam-Z inoltre potrà documentare anche processi dinamici, come vortici di polvere, il movimento delle nubi e fenomeni astronomici, nonché attività di spostamento del rover, campionatura e stoccaggio di reperti geologici. Con un peso complessivo di circa 4 kg avrà una risoluzione di 1600x1200 pixel (ovvero 2-megapixel) con un assorbimento di potenza medio di circa 17 W[29].
- Supercam:
- La Supercam è uno strumento LIBS (Laser Induced Breakdown Spectroscopy), evoluzione della ChemCam montata su Curiosity, che potrà fornire immagini e l’analisi chimica della composizione mineralogica a distanza di 7 m dal sito, analizzando quindi quei posti che rover non potrebbe raggiungere con il braccio meccanico. Sarà anche in grado di rilevare la presenza di composti organici e vaporizzarne una piccola quantità per analizzare lo spettro della luce emessa usando la micro-imaging. Sviluppato dal Los Alamos National Laboratory e dal CESR Laboratory, il laser infrarosso che impiega per la vaporizzazione irradia impulsi di 5 ns con lunghezza d'onda di 1064 nm e una densità di potenza pari a 1 GW/cm², generando 30 mJ di energia. La rilevazione viene poi effettuata in uno spettro tra 400 nm e 900 nm.[30] Lo strumento è inoltre dotato di un microfono in grado di registrare il suono durante la vaporizzazione dei materiali e durante la marcia del rover. Supercam è maggiormente sviluppato dal CNES "Centre national d’études spatiales" e dall'IRAP "Institut de Recherche en Astrophysique et Planetologie" francesi. È montata sulla sommità della "testa" del rover, pesa circa 5,6 kg e ha un assorbimento medio di potenza di circa 18 W[31].

- PIXL (Planetary Instrument for X-Ray Lithochemistry):
- È uno spettrometro a fluorescenza X con inclusa una fotocamera ad alta risoluzione, montata alla fine del braccio robotizzato in modo tale da essere posizionato vicino al suolo o su una roccia, verrà utilizzato per determinare con precisione gli elementi che compongono i campioni analizzati.[5] Lo strumento emette raggi X in un punto da analizzare per una durata compresa tra pochi secondi e 2 minuti, dopodiché si sposta su un altro punto da analizzare muovendosi linearmente con uno schema a griglia. L'area mappata è delle dimensioni di un francobollo. Il PIXL include inoltre una fotocamera ad alta risoluzione, in tal modo la mappa degli elementi chimici può essere confrontata in congiunzione a una fotografia del campione in esame[32] pesa circa 4,3 kg e ha un assorbimento di 25 W.

- SHERLOC ( Scanning Habitable Environments with Raman & Luminescence for Organics & Chemicals):
- Montato come il PIXL sul braccio robotico, è uno spettrometro Raman a ultravioletti accompagnato da una fotocamera per la ricerca di composti organici e minerali che sono stati contaminati da ambienti acquosi e magari con tracce di vita microbica[33]. SHERLOC irradia un ristretto raggio laser a ultravioletti su un obiettivo, causando due distinti fenomeni spettroscopici che lo strumento cattura per le analisi. Il primo è un effetto di fluorescenza da parte delle molecole che contengono anelli di carbonio. Tali molecole possono essere degli indizi che indicano che sono state conservate tracce di vita biologica passata. Il secondo effetto è chiamato scattering Raman che può identificare alcuni molecole, ad esempio formatesi a causa dell'evaporazione di acqua salata e composti organici. Questi due effetti combinati insieme offrono una profonda analisi di tanti diversi composti nello stesso punto[34]. Lo strumento pesa 4,72 kg e ha un assorbimento di 48,8 W[33].
- MOXIE (Mars Oxygen In-Situ Resource Utilization Experiment):
- Il Moxie è uno strumento per la dimostrazione scientifica dell'estrazione, in condizioni locali, di ossigeno (O2) dall'anidride carbonica (CO2) che compone quasi esclusivamente l'atmosfera marziana[35]. Il Moxie dapprima immagazzina e comprime la CO2, poi, attraverso una reazione elettrolitica divide le molecole di CO2 in O2 e monossido di carbonio (CO). Lo strumento è formato da tre moduli, il primo è il CAC (The (CO2) Acquisition and Compression), ovvero il compressore, il quale aspira CO2 dall'atmosfera e la comprime a ~ 1 atm. Il gas pressurizzato viene quindi fornito al secondo modulo, il SOXE (Solid OXide Electrolyzer), ovvero il modulo dove avviene la reazione elettrolitica: 2CO2 → O2 + 2CO[36] dove la O2 viene prodotta all'anodo, è equivalente al processo di una cella a combustibile al contrario. Il SOXE opera a una temperatura di circa 800 °C, necessita quindi di una sofisticata protezione termica, compreso un preriscaldamento del gas in ingresso e un raffreddamento del gas in uscita. Il flusso d'uscita della O2 è separato da quello della O2 e CO, questo per permettere di verificare meglio la quantità di ossigeno prodotta. Inoltre la corrente che passa attraverso il SOXE è un risultato diretto del passaggio ioni ossidi attraverso l'elettrolita e questo fornisce una misura indipendente del tasso di produzione di O2 prodotta. La misura della quantità di O2 in uscita viene misurata dal terzo modulo. Il tutto viene gestito da un'elettronica che raccoglie i dati e li spedisce verso Terra[37]. Il MOXIE pesa non più di 1,8 kg[38] e ha un assorbimento di 300 W[39].

- MEDA (Mars Environmental Dynamics Analyzer):
- È un set di sensori che forniscono misurazioni di temperatura, velocità e direzione del vento, pressione, umidità relativa e forma e dimensione del pulviscolo in sospensione nell’atmosfera.[5] Per la misurazione della temperatura dell'aria il sensore è composto da 5 sensori di cui 3 sono installati sul braccio principale, i rimanenti 2 sono installati sul corpo principale. Il range di misurazione è tra -123 °C a +27 °C. Il sensore di umidità è posizionato all'interno del braccio principale. Il sensore di pressione è posizionato all'interno del corpo e collegato all'esterno attraverso una piccola apertura protetta da un filtro HEPA, il range va da 1 a 1150 Pa. Il sensore della radiazione termica è posizionato all'interno del braccio principale e misura la radiazione nel campo dell'infrarosso. Sempre nel braccio principale ci sono due sensori della velocità e direzione del vento[40]. Lo strumento è realizzato dal Centro de Astrobiologia, Instituto Nacional de Tecnica Aeroespacial (CSIC-INTA) in Spagna. Il Meda pesa circa 5,5 kg e ha un assorbimento fino a 17 W[41].
- RIMFAX (The Radar Imager for Mars’ subsurFAce eXploration):
- È un radar in grado di rilevare la struttura del suolo marziano. Il diagramma che si ottiene dal segnale di ritorno è simile a un'ecografia. Il segnale varia a seconda se è presente ghiaccio, rocce, sabbia o acqua.[42] Il radar opera tra le frequenze di 150 MHz e 1,2 GHz, esso sarà in funzione durante gli spostamenti del rover per raccogliere man mano dati del suolo marziano. Le aspettative sono quelle di riuscire a "penetrare" fino a 10 metri di profondità. L'obiettivo è quello di riuscire a mappare il sottosuolo nelle vicinanze del sito d'atterraggio e nei dintorni di un eventuale campione di roccia prelevato.[43] Il radar pesa meno di 3 kg e ha un assorbimento fino a 10 W.[42]
Mars Helicopter Scout
MHS (Ingenuity) è un piccolo elicottero che sarà il primo velivolo più pesante dell'atmosfera a volare su un altro pianeta. Avrà una massa di 1,8 kg e, una volta atterrato con il rover, compirà nell'arco di 30 giorni dei test di volo della durata di 90 s.[44]
Dispone di due telecamere ad alta risoluzione per la navigazione, ma non ha strumenti scientifici a bordo.
Panoramica della missione
Lancio
Dopo alcuni ritardi[45], il lancio è avvenuto con successo il 30 luglio 2020 alle ore 7:50 EDT (13:50 ora italiana), a bordo di un razzo Atlas V 541.[3][46]

Atterraggio

Il rover Perseverance è atterrato nel cratere Jezero alle 21:55 CET del 18 febbraio 2021.[7] La notizia dell'atterraggio è stata data da Swati Mohan, ingegnera aerospaziale responsabile delle operazioni di guida e controllo della missione.[47][48]
Curiosità

Come la missione InSight[49], la NASA ha proposto una nuova iniziativa mediatica che coinvolgerà il pubblico appassionato: la sonda sarà dotata di microchip con incisi i nomi delle persone che parteciperanno: tramite la compilazione di un form sarà possibile far aggiungere il proprio nome ricevendo una sorta di carta di imbarco con lo stemma ufficiale della missione.
Galleria d'immagini
Strumenti
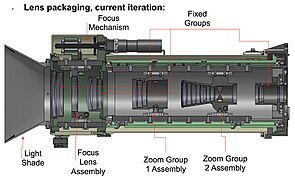
Illustrazione della struttura della Mastcam-Z

Diagramma d'esempio ottenuto dalle elaborazioni del PIXL
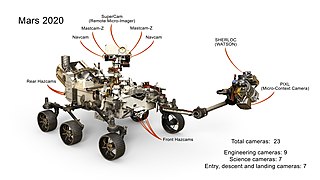
Fotocamere a bordo

Testa del rover, sono facilmente individuabili le fotocamere e inferiormente le sporgenze dove sono alloggiati i sensori del MEDA

Rappresentazione artistica del RIMFAX

Rappresentazione artistica del Mars Helicopter Scout
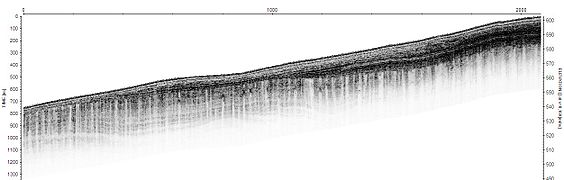
Diagramma d'esempio ottenuto dal "radar" RIMFAX




.jpg)


Elaborazioni artistiche




Altre
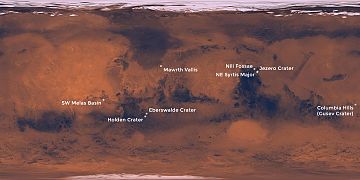
Selezione dei possibili luoghi d'atterraggio

Rappresentazione del funzionamento del Range-Trigger

Rappresentazione del "Adaptive-caching" ovvero della raccolta dei campioni rocciosi. Le linee continue rappresentano gli spostamenti della missione primaria, quelle tratteggiate invece un'eventuale missione secondaria



Note
- ^ a b Rudy Bidoggia, Nasa prenota un Atlas V, su astronautinews.it, 5 agosto 2016.
- ^ (EN) Jeff Foust, Razzo vettore Atlas V, su space.com, 26 agosto 2016.
- ^ a b c (EN) United Launch Alliance Atlas V Rocket Launches with NASA's Mars Perseverance Rover, su nasa.gov, 30 luglio 2020. URL consultato il 30 luglio 2020.
- ^ (EN) Karen Northon, NASA Awards Launch Services Contract for Mars 2020 Rover Mission, su nasa.gov, 25 agosto 2016.
- ^ a b c d e f g h i Alberto Zampieron, Prende forma il rover marziano del 2020, su astronautinews.it, 16 luglio 2016.
- ^ a b c (EN) Panoramica missione, su mars.nasa.gov.
- ^ a b c (EN) NASA, Landing Toolkit: Perseverance Rover - NASA Mars, su mars.nasa.gov, 18 gennaio 2020. URL consultato il 19 febbraio 2021.
- ^ (EN) Mars 2020 body, su mars.nasa.gov. URL consultato il 13 febbraio 2018.
- ^ a b c (EN) Dwayne Brown, Strumentazione scientifica, su mars.nasa.gov, 31 luglio 2014.
- ^ a b c d Elisabetta Bonora, La NASA annuncia il payload per la missione Mars 2020, su aliveuniverse.today, 1º agosto 2014.
- ^ Emiliano Ricci, Il rover della NASA è in volo per Marte, su Le Scienze (a cura di), lescienze.it, 30 luglio 2021.
- ^ Rudy Bidoggia, Gli obiettivi del prossimo rover marziano, su astronautinews.it, 12 luglio 2013.
- ^ (EN) Mars 2020 Mission Contributions to NASA's Mars Exploration Program Science Goal, su mars.nasa.gov.
- ^ (EN) Goal 1: Determine if Life Ever Arose On Mars, su mars.nasa.gov.
- ^ (EN) Goal 2: Characterize the Climate of Mars, su mars.nasa.gov.
- ^ (EN) Goal 3: Characterize the Geology of Mars, su mars.nasa.gov.
- ^ (EN) Adaptive Caching Concept, su mars.nasa.gov, 10 giugno 2015.
- ^ (EN) Goal 4: Prepare for the Human Exploration of Mars, su mars.nasa.gov.
- ^ nei 2,1 miliardi ci sono circa 130 milioni per lo sviluppo della strumentazione scientifica. Ai 2,1 miliardi vanno aggiunti circa 250 milioni per le operazioni durante la missione primaria.
- ^ a b (EN) Matt Williams, NASA goes with atlas V to launch Mars 2020 rover, su universetoday.com, 26 settembre 2016.
- ^ a b (EN) Jeff Foust, La missione Mars 2020 costerà più di 2 mld di dollari, su spacenews.com, 20 luglio 2016.
- ^ (EN) Dan Leone, U.S. Plutonium Stockpile Good for Two More Nuclear Batteries after Mars 2020, su spacenews.com, 11 marzo 2015.
- ^ DEIS (PDF), su mars.nasa.gov.
- ^ (EN) Tim Sharp, What is the Temperature of Mars?, su space.com, 3 agosto 2012.
- ^ a b c (EN) Entry, Descent, and Landing Technologies, su mars.nasa.gov.
- ^ (EN) The cameras on the mars 2020 rover, su mars.nasa.gov. URL consultato il 13 febbraio 2018.
- ^ (EN) Microphones on mars 2020, su mars.nasa.gov. URL consultato il 13 febbraio 2018.
- ^ a b (EN) Mastcam-Z, su mars.nasa.gov.
- ^ (EN) Mastcam-Z Overview, su mars.nasa.gov.
- ^ (EN) Supercam, su mars.nasa.gov.
- ^ (EN) Supercam overview, su mars.nasa.gov.
- ^ (EN) Mars 2020 Rover's PIXL to Focus X-Rays on Tiny Targets, su jpl.nasa.gov.
- ^ a b (EN) SHERLOC overview, su mars.nasa.gov.
- ^ (EN) SHERLOC to Micro-Map Mars Minerals and Carbon Rings, su jpl.nasa.gov.
- ^ (EN) MOXIE, su jpl.nasa.gov.
- ^ non bilanciata
- ^ (EN) Mars Oxygen ISRU Experiment (MOXIE), su mars.nasa.gov.
- ^ (EN) Air Squared Awarded Contract to Develop Scroll Compressor in NASA MOXIE Demonstration Unit for Mars 2020 Mission, su airsquared.com, 2 febbraio 2016.
- ^ (EN) MOXIE overview, su mars.nasa.gov.
- ^ (EN) Mars Environmental Dynamics Analyzer (MEDA), su mars.nasa.gov.
- ^ (EN) MEDA overview, su mars.nasa.gov.
- ^ a b (EN) RIMFAX Overview, su mars.nasa.gov.
- ^ (EN) Radar Imager for Mars' subsurFAce eXperiment (RIMFAX), su mars.nasa.gov.
- ^
 INAF, Gli ultimi 13 centimetri di Ingenuity, su YouTube, 25 giugno 2020.
INAF, Gli ultimi 13 centimetri di Ingenuity, su YouTube, 25 giugno 2020.
- ^ ncora un ritardo del lancio di Perseverance per Marte, su astronautinews.it, 2 luglio 2020. URL consultato il 30 luglio 2020.
- ^ (EN) space.com, Blastoff! NASA's Perseverance rover launches to Mars, su YouTube, 30 luglio 2020.
- ^ (EN) Harmeet Kaur, The face of the Perseverance landing was an Indian American woman, su edition.cnn.com, 19 febbraio 2021.
- ^ (EN) Swati Mohan - Mars 2020 Guidance & Controls Operations Lead, su Mars Exploration Program and the Jet Propulsion Laboratory, NASA. URL consultato il 21 febbraio 2021 (archiviato il 20 febbraio 2021).
- ^ (EN) mars.nasa.gov, More Than 2.4 Million Names Are Going to Mars | Mars News, su mars.nasa.gov. URL consultato il 26 luglio 2018.
Voci correlate
- Lista degli oggetti artificiali su Marte
- Missioni spaziali in corso
- Mars Polar Lander
- Mars Science Laboratory
Altri progetti
 Wikimedia Commons contiene immagini o altri file su Perseverance
Wikimedia Commons contiene immagini o altri file su Perseverance
Collegamenti esterni
- (EN) Home page Mars 2020, su mars.nasa.gov.
- (EN) Home page JPL Mars 2020, su jpl.nasa.gov.

Informazione
L'articolo Mars 2020 in Wikipedia italiana ha preso i seguenti posti nella classifica di popolarità locale:
- 65 ° posto il 2020-07-30
- 14 ° posto il 2021-02-18
- 9 ° posto il 2021-02-19
- 66 ° posto il 2021-02-20
Sulla pagina
Il contenuto presentato dell'articolo di Wikipedia è stato estratto 2021-06-13 sulla base di https://it.wikipedia.org/?curid=6131767